`mekatronik` ile İlgili Madde Sonuçları

Kolaboratif Robot
Kolaboratif robot insanlarla aynı çalışma ortamında güvenli biçimde birlikte çalışmak üzere tasarlanmış endüstriyel robot türüdür. Geleneksel endüstriyel robotların aksine kolaboratif robotlar, fiziksel bariyerler olmadan insan operatörlerle ortak görevler gerçekleştirebilir. Bu robotlar; sensörler, yapay zekâ destekli kontrol sistemleri ve gelişmiş güvenlik algoritmaları sayesinde çevrelerini algılayarak güvenli hareket eder.TarihçeKolaboratif robot kavramı ilk kez 1990’lı yıllarda insan-robot
TR
Adem Hamza
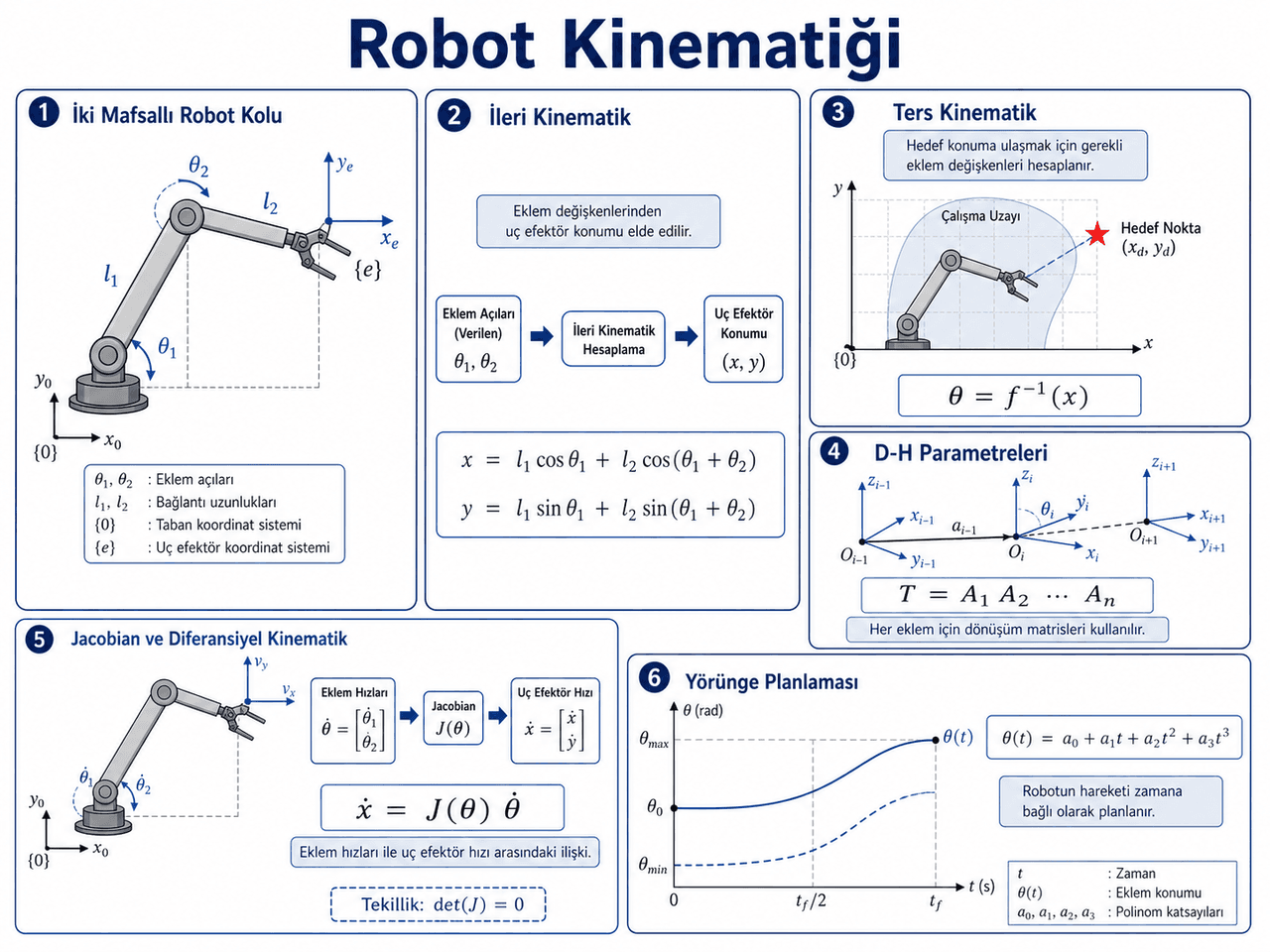
Robot Kol Kinematiği
Robot KinematiğiGirişRobot kinematiği, robotların hareketlerini kuvvet, tork, kütle ve atalet gibi dinamik etkileri dikkate almadan inceleyen mühendislik alanıdır. Bu alanın temel amacı, robotun eklem değişkenleri ile uç efektörünün uzaydaki konumu ve yönelimi arasındaki matematiksel ilişkiyi kurmaktır. Uç efektör; robot kolunun sonunda bulunan tutucu, kaynak aparatı, kamera, kesici takım veya görev yapan herhangi bir araç olabilir.Robot kinematiği özellikle robot tasarımı, hareket kontrolü, yör
TR
Ferhat Yıldız
 Me
MeMekatronik Mühendisliği
Mekatronik mühendisliği; makine, elektronik, bilgisayar ve kontrol mühendisliği disiplinlerinin bir araya geldiği, çok disiplinli bir mühendislik alanıdır. Bu alan; akıllı sistemlerin, robotların, otomatik makinelerin ve teknolojik cihazların tasarımı, üretimi ve geliştirilmesiyle ilgilenir.Mekatronik mühendisliği şemasıTarihçe ve GelişimMekatronik kavramı ilk olarak 1960’larda Japonya’da ortaya çıkmış, zamanla teknolojik ilerlemelerle birlikte ayrı bir mühendislik disiplini haline gelmiştir. Gü
TR
Faruk Suvay
MeMekatronik (Sözlük)
TanımisimMakine, elektronik, yazılım ve kontrol mühendisliğini içeren çok disiplinli bir mühendislik dalı.Otomobillerde şanzımanın kontrol ünitesi.Köken"Mekatronik" kelimesinin kökeni, Japonca bir terime dayanmaktadır. 1969 yılında Japonya'da, Yaskawa Electric Corporation adlı şirketin bir mühendisi olan Tetsuro Mori, "mechatronic" terimini, "mechanic" (mekanik) ve "electronic" (elektronik) kelimelerinin bir birleşimi olarak ortaya çıkardı. Şirket bu terimi 1970 yılında ticari marka olarak tesci
TR
Ömer Said Aydın