`endustriyel-robotlar` ile İlgili Madde Sonuçları

Kolaboratif Robot
Kolaboratif robot insanlarla aynı çalışma ortamında güvenli biçimde birlikte çalışmak üzere tasarlanmış endüstriyel robot türüdür. Geleneksel endüstriyel robotların aksine kolaboratif robotlar, fiziksel bariyerler olmadan insan operatörlerle ortak görevler gerçekleştirebilir. Bu robotlar; sensörler, yapay zekâ destekli kontrol sistemleri ve gelişmiş güvenlik algoritmaları sayesinde çevrelerini algılayarak güvenli hareket eder.TarihçeKolaboratif robot kavramı ilk kez 1990’lı yıllarda insan-robot
TR
Adem Hamza
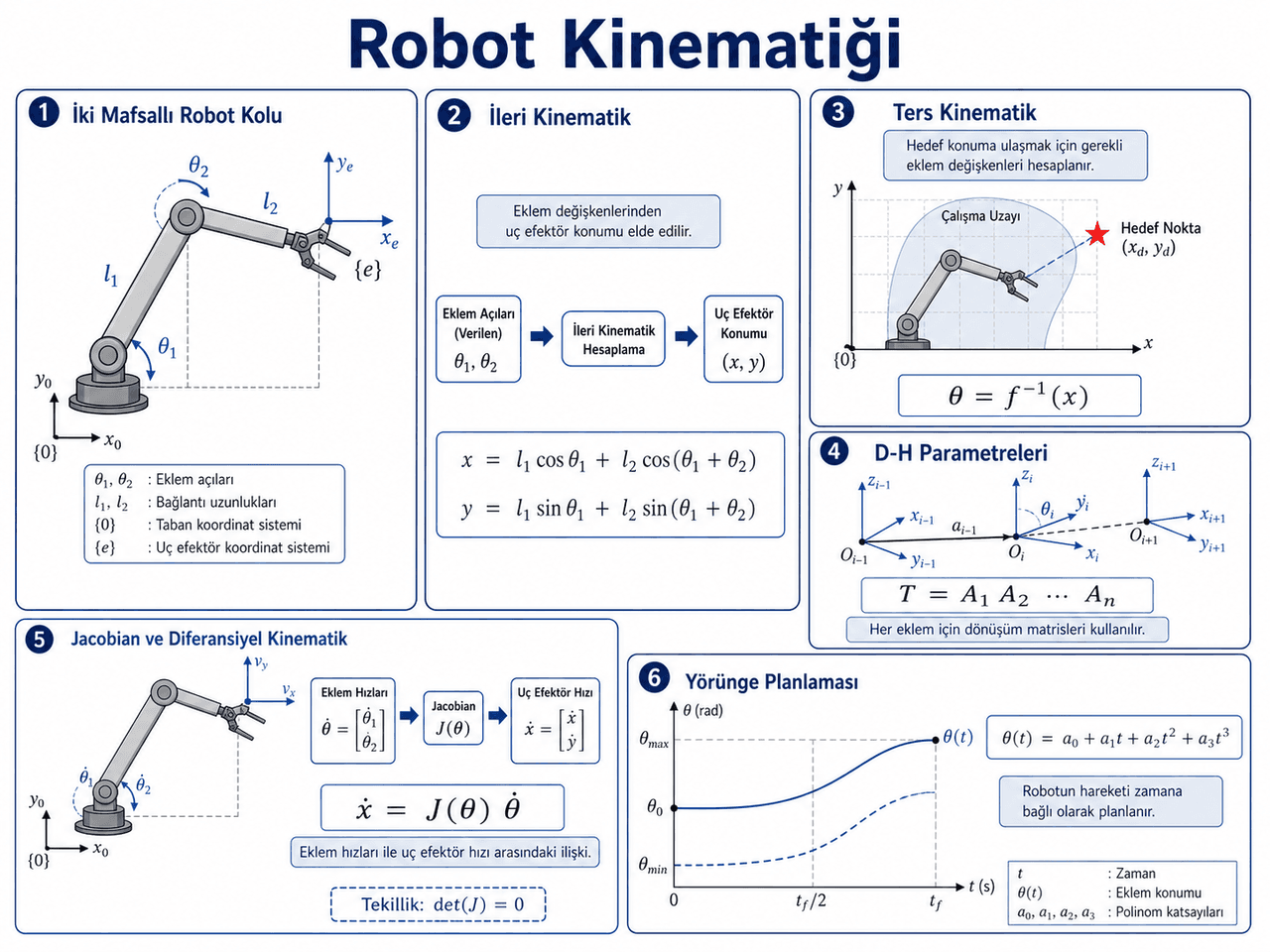
Robot Kol Kinematiği
Robot KinematiğiGirişRobot kinematiği, robotların hareketlerini kuvvet, tork, kütle ve atalet gibi dinamik etkileri dikkate almadan inceleyen mühendislik alanıdır. Bu alanın temel amacı, robotun eklem değişkenleri ile uç efektörünün uzaydaki konumu ve yönelimi arasındaki matematiksel ilişkiyi kurmaktır. Uç efektör; robot kolunun sonunda bulunan tutucu, kaynak aparatı, kamera, kesici takım veya görev yapan herhangi bir araç olabilir.Robot kinematiği özellikle robot tasarımı, hareket kontrolü, yör
TR
Ferhat Yıldız

Robotik Otomasyon
Robotik otomasyon, otomasyon sistemleri içerisinde belirli fiziksel görevleri yerine getirebilen mekanik sistemlerin, yani robotların kullanıldığı bir alt alandır. Bu sistemler; algılama, karar verme ve harekete geçme yetenekleri ile donatılmış olup, genellikle önceden programlanmış komutlara veya çevresel veriye dayalı olarak çalışırlar. Robotik otomasyon, üretim süreçlerinin tekrarlanabilirliğini, hızını ve doğruluğunu artırma amacı taşır.Robotik sistemler, üç temel bileşenden oluşur: mekanik
TR
Sıla Başköylü