Step motor, elektriksel sinyallerle belirli açılarla dönen bir elektrik motoru türüdür. Her bir elektriksel pulse (adım), motorun rotasında belirli bir açıya denk gelir ve bu şekilde motor, tahrik edilen yükü hassas bir şekilde hareket ettirebilir. Step motorları, özellikle hassas kontrol gerektiren uygulamalarda yaygın olarak kullanılır; örneğin 3D yazıcılar, robotlar, CNC makineleri ve otomasyon sistemlerinde.
Step motorları, genellikle iç yapılarındaki manyetik alanlar aracılığıyla tahrik edilen rotor ile stator arasında etkileşimle çalışır. Rotor, motorun her adımda belirli bir miktarda dönmesini sağlayan, genellikle birkaç sabit pozisyonda kalabilen bir yapıya sahiptir. Bu özellik, step motorların, sürekli dönen motorlardan farklı olarak, çok hassas ve kontrollü hareketler yapabilmesini mümkün kılar.
Step motorlar, genellikle dört ana türde bulunur: Bipolar step motorlar, unipolar step motorlar, hibrid step motorlar ve piezoelektrik step motorlar. Her türün kendine özgü çalışma prensipleri ve uygulama alanları vardır.
Step motorlar, elektriksel sinyaller ile belirli açılarla dönen bir motor türüdür. Her bir elektriksel pulse, motorun rotorunun belirli bir açıya dönmesini sağlar ve bu şekilde motor, tahrik edilen yükü hassas bir şekilde hareket ettirebilir. Step motorlarının temel çalışma prensibi, rotorun manyetik alanlarla etkileşime girerek, belirli açılarda dönmesini sağlamaktır.
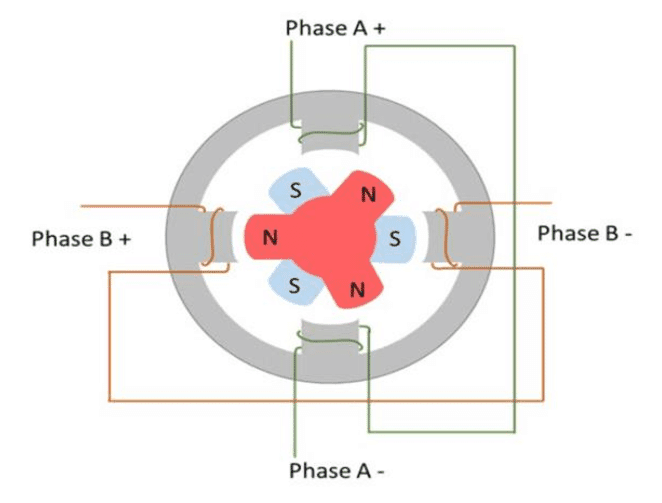
Step Motor Faz Besleme Şeması (researchgate.net)
Step motorlar dışarıdan gelen dijital sinyallerle çalışır. Bu sinyaller, motorun statorundaki bobinlere uygulanır ve bobinler manyetik alan oluşturur. Her bir elektriksel pulse, motorun rotorunun bir adım dönmesini sağlar. Step motorlarında her bir adım genellikle belirli bir açıyı ifade eder (örneğin, 1.8 derece). Bu adımlar, motorun hareketini hassas bir şekilde kontrol etmeye olanak tanır.
Bir motorun tam dönüş yapabilmesi için, rotorun genellikle 200 adımda bir tam dönecek şekilde ayarlanmış olması gerekir (1.8 derece adım açısıyla). Farklı step motor türlerinde bu açı değişebilir, bazı motorlar daha küçük adımlarla (örneğin, 0.9 derece) çalışabilir.
Step motorlarının iki ana bileşeni vardır: rotor ve stator. Stator, motorun sabit kısmını oluştururken, rotor dönen kısmıdır.
Her bir elektriksel pulse, rotorun bir adım dönmesini sağlar. Rotorun hareketi, statorun bobinlerine uygulanan elektriksel akımın yönü ve gücü ile ilişkilidir.
Step motorlarının her adımı belirli bir açıyla sınırlıdır. En yaygın adım açısı, her adımda 1.8 derece dönmesidir. Bu da bir tam dönüş için 200 adım gerektiği anlamına gelir. Farklı step motor türlerinde bu açı değişebilir, bazı motorlar daha küçük adımlarla (örneğin, 0.9 derece) çalışabilir.
Motorun adım açısı, uygulamanın gereksinimlerine göre belirlenebilir. Adım açısının küçük olması, motorun daha hassas hareket etmesini sağlar ve bu da özellikle yüksek hassasiyet gerektiren uygulamalarda büyük bir avantajdır.
Step motorlarının en önemli özelliklerinden biri, her bir adımın rotorun belirli bir pozisyonda durmasına yol açmasıdır. Bu, step motorlarını hassas konum kontrolü gerektiren uygulamalarda ideal bir seçenek haline getirir. Adım motoru, her bir elektriksel sinyalle bir adım atarak, rotorun hassas bir şekilde belirli bir konumda durmasını sağlar. Bu özellik, özellikle robotik ve otomasyon sistemlerinde, yüklerin doğru bir şekilde konumlandırılması gereken durumlarda faydalıdır.
Step motorları, çalışma prensipleri ve yapılarına göre farklı türlerde sınıflandırılabilir. Bu türler, motorların performansını, verimliliğini, tork üretimini ve kullanım alanlarını etkileyen önemli özellikler taşır. Temelde üç ana step motor türü bulunur: Bipolar, Unipolar ve Hibrid step motorlar. Her bir tür, farklı uygulamalarda avantajlar ve sınırlamalar sunar.
Bipolar step motorları, bobinlerin elektrik akımının yönünü değiştirebilmesine olanak tanır. Bu motor türünde, her bir bobine uygulanan akımın yönü tersine çevrilebilir, bu sayede rotorun dönmesi için gerekli manyetik alanlar üretilebilir. Bipolar step motorları, genellikle daha yüksek tork üretir ve daha verimli çalışır. Ancak, bu tür motorlar daha karmaşık bir sürücü devresine ihtiyaç duyar, çünkü her bobinin akım yönü değiştirilmelidir.
Bipolar motorların tork üretiminde yüksek performans sergilemesi, onları endüstriyel otomasyon, robotik sistemler ve CNC makineleri gibi uygulamalarda tercih edilen bir seçenek haline getirir.
Unipolar step motorları, her bobin için tek yönlü manyetik alan üretir. Bu motor türünde, bobinlerin her biri yalnızca bir yönde manyetik alan üretir ve akımın yönü değiştirilmez. Unipolar motorlar, genellikle daha basit sürücülerle çalıştırılabilir, ancak torkları bipolar motorlara kıyasla daha düşüktür. Unipolar motorların yapısı, onları daha kolay kontrol edilebilir hale getirir.
Unipolar motorlar, düşük tork gerektiren uygulamalarda ve daha basit sistemlerde yaygın olarak kullanılır. Ayrıca, daha düşük maliyetli çözümler sunarak, masaüstü cihazlarda ve küçük otomasyon sistemlerinde tercih edilir.
Hibrid step motorları, bipolar ve unipolar motorların avantajlarını birleştiren bir tasarıma sahiptir. Bu motor türü, hem yüksek tork hem de daha verimli bir çalışma sağlar. Hibrid motorlar, genellikle daha ince bir adım açısına sahip olup, hassas konumlandırma ve yüksek performans gerektiren uygulamalarda kullanılır. Rotorları genellikle sinüs dalgası şeklinde manyetik alanlar üretir ve bu da motorun daha düzgün çalışmasını sağlar.
Hibrid step motorlar, 3D yazıcılar, CNC makineleri, robotik sistemler ve diğer hassas kontrol uygulamalarında yaygın olarak tercih edilir. Bu motorlar, her iki türün de avantajlarını sunarak daha geniş bir kullanım alanına sahiptir.
Step motorunun iki ana bileşeni, motorun temel çalışma prensibini şekillendiren ve motorun performansını doğrudan etkileyen önemli parçalardır: stator ve rotor. Bu iki bileşen, step motorunun manyetik etkileşimini sağlayarak rotorun adım adım dönmesini mümkün kılar.
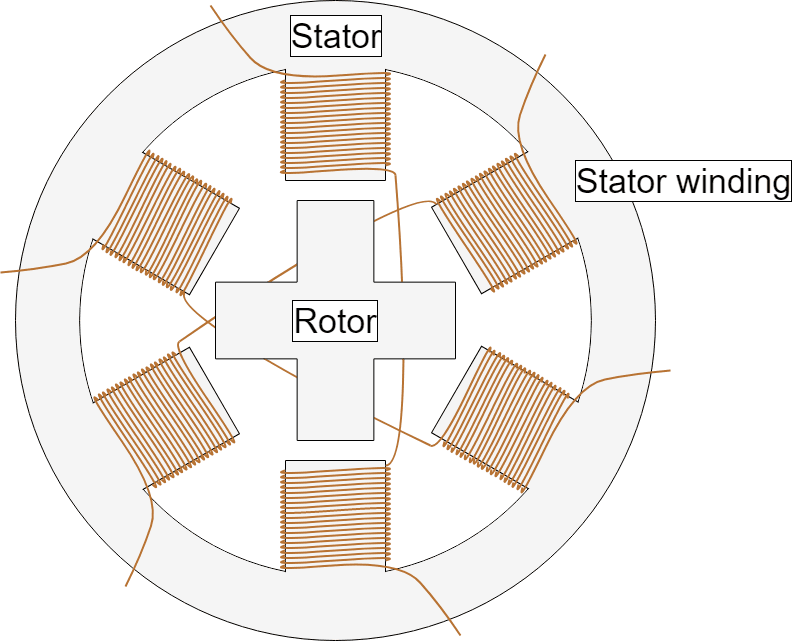
Step Motor Yapısı-monolithicpower
Stator, step motorunun sabit kısmıdır ve motorun dış kısmında yer alır. Stator, elektriksel akımı alarak manyetik alanlar üreten bobinlerden oluşur. Bu bobinler, rotorun hareketini kontrol eden manyetik alanı yaratır ve rotor, bu manyetik alanlarla etkileşerek döner.
Stator Bileşenleri:
Statorun Rolü:
Rotor, step motorunun dönen kısmıdır ve stator tarafından üretilen manyetik alanlarla etkileşerek hareket eder. Rotor, motorun güç üretme işlevini yerine getirir ve tahrik edilen yükü taşır. Rotorun iç yapısı, motorun tipine bağlı olarak değişebilir, ancak genellikle mıknatıslar veya manyetik malzemeler içerir.
Rotor Bileşenleri:
Rotorun Rolü:
Step motorlar, birçok farklı alanda kullanılabilen hassas ve güvenilir motorlardır. Yüksek doğruluk ve kontrollü hareket gereksinimi olan her türlü uygulama için uygundur. İşte step motorlarının yaygın kullanıldığı alanlar ve avantajları ile dezavantajları:

Step Motor Endüstriyel Robot Kol Uygulaması-ato.com
ElProCus. “Stepper Motor: Construction, Working, Types and Its Applications.” Erişim tarihi: 09.05.2025. https://www.elprocus.com/stepper-motor-types-advantages-applications/.
Faradyi Motors. “Comprehensive Analysis of the Advantages and Disadvantages of Stepper Motors.” Erişim tarihi: 09.05.2025. https://faradyi.com/comprehensive-analysis-of-the-advantages-and-disadvantages-of-stepper-motors/.
Lammotor. “What Is Stepper Motor: Types, Applications, and Working Principle.” Erişim tarihi: 09.05.2025. https://lammotor.com/what-is-stepper-motor/.
Robotiksistem. “Step Motor Çeşitleri.” Erişim tarihi: 09.05.2025. https://www.robotiksistem.com/step_motor_cesitleri.html.
Henüz Tartışma Girilmemiştir
"Step Motor" maddesi için tartışma başlatın
Çalışma Prensibi
Elektriksel Sinyaller ve Adım Hareketi
Rotor ve Stator Etkileşimi
Adım Açıları ve Hassasiyet
Adım Hareketi ve Konum Kontrolü
Step Motor Türleri
Bipolar Step Motorlar
Unipolar Step Motorlar
Hibrid Step Motorlar
Step Motor Yapısı
Stator (Sabit Kısım)
Rotor (Dönen Kısım)
Step Motor Uygulama Alanları ve Avantajları / Dezavantajları
Uygulama Alanları
Avantajlar
Dezavantajlar
Bu madde yapay zeka desteği ile üretilmiştir.