This article was automatically translated from the original Turkish version.
A stepper motor is a type of electric motor that rotates in specific angular increments in response to electrical signals. Each electrical pulse (step) corresponds to a precise angular movement of the motor’s rotor, enabling the motor to move the driven load with high precision. Stepper motors are widely used in applications requiring precise control, such as 3D printers, robots, CNC machines, and automation systems.
Stepper motors operate through interaction between a rotor and a stator, typically driven by magnetic fields within the motor’s internal structure. The rotor has a design that allows it to lock into several fixed positions, ensuring that it rotates by a specific amount with each step. This characteristic enables stepper motors to achieve highly precise and controllable movements, unlike continuous-rotation motors.
Stepper motors are generally classified into four main types: bipolar stepper motors, unipolar stepper motors, hybrid stepper motors, and piezoelectric stepper motors. Each type has its own unique operating principles and application areas.
Stepper motors are a type of electric motor that rotates in specific angular increments in response to electrical signals. Each electrical pulse causes the motor’s rotor to rotate by a precise angle, allowing the motor to move the driven load with high accuracy. The fundamental operating principle of stepper motors involves the rotor interacting with magnetic fields to rotate in discrete angular steps.
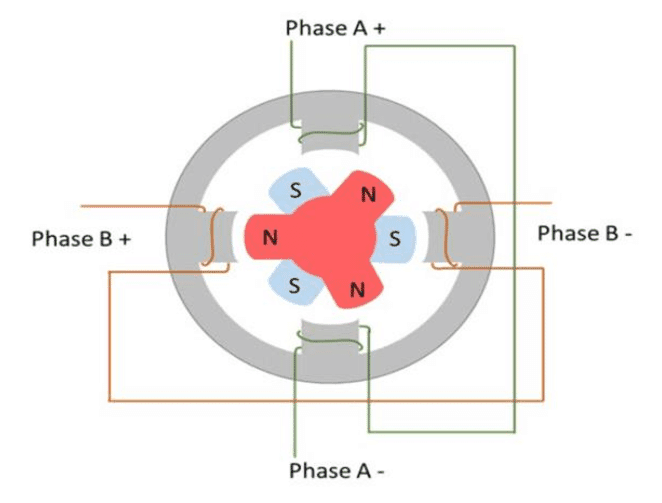
Stepper Motor Phase Excitation Diagram (researchgate.net)
Stepper motors operate using external digital signals. These signals are applied to coils in the motor’s stator, generating magnetic fields. Each electrical pulse causes the rotor to rotate by one step. In stepper motors, each step typically corresponds to a specific angle—for example, 1.8 degrees. These steps enable precise control of the motor’s motion.
To complete one full revolution, the rotor is usually designed to move in 200 steps (with a step angle of 1.8 degrees). This angle can vary among different stepper motor types; some motors operate with smaller step angles, such as 0.9 degrees.
Stepper motors have two main components: the rotor and the stator. The stator forms the stationary part of the motor, while the rotor is the rotating part.
Each electrical pulse causes the rotor to rotate by one step. The rotor’s motion is directly related to the direction and magnitude of the electrical current applied to the stator coils.
Each step of a stepper motor is limited to a specific angular increment. The most common step angle is 1.8 degrees per step, meaning 200 steps are required for a full rotation. This angle can vary among different stepper motor types; some motors operate with smaller step angles, such as 0.9 degrees.
The step angle can be selected based on application requirements. A smaller step angle allows the motor to move with greater precision, which is a significant advantage in applications demanding high accuracy.
One of the most important features of stepper motors is that each step results in the rotor stopping at a specific position. This makes stepper motors an ideal choice for applications requiring precise position control. With each electrical signal, the motor advances by one step, precisely positioning the rotor. This feature is particularly useful in robotics and automation systems, where loads must be accurately positioned.
Stepper motors can be classified into different types based on their operating principles and construction. These types carry important characteristics that affect the motor’s performance, efficiency, torque production, and application suitability. Fundamentally, there are three main types of stepper motors: bipolar, unipolar, and hybrid. Each type offers distinct advantages and limitations for different applications.
Bipolar stepper motors allow the direction of current through their coils to be reversed. In this type, the current direction in each coil can be inverted, enabling the generation of the magnetic fields required to rotate the rotor. Bipolar stepper motors typically produce higher torque and operate more efficiently. However, they require more complex driver circuits because the current direction in each coil must be precisely controlled.
The high torque performance of bipolar motors makes them a preferred choice in industrial automation, robotic systems, and CNC machines.
Unipolar stepper motors generate magnetic fields in only one direction per coil. In this type, each coil produces a magnetic field in a single direction, and the current direction is not reversed. Unipolar motors can be driven with simpler driver circuits, but they produce lower torque compared to bipolar motors. Their design makes them easier to control.
Unipolar motors are commonly used in applications requiring low torque and in simpler systems. They are also preferred in desktop devices and small automation systems due to their lower cost.
Hybrid stepper motors combine the advantages of both bipolar and unipolar designs. This type of motor delivers high torque and efficient operation. Hybrid motors typically feature a smaller step angle, making them suitable for applications requiring precise positioning and high performance. Their rotors often generate sinusoidal magnetic fields, resulting in smoother motor operation.
Hybrid stepper motors are widely preferred in 3D printers, CNC machines, robotic systems, and other precision control applications. By combining the benefits of both bipolar and unipolar designs, they offer a broader range of usability.
The two main components of a stepper motor—stator and rotor—are critical parts that shape the motor’s fundamental operating principle and directly influence its performance. These two components enable the magnetic interactions that allow the rotor to rotate in discrete steps.
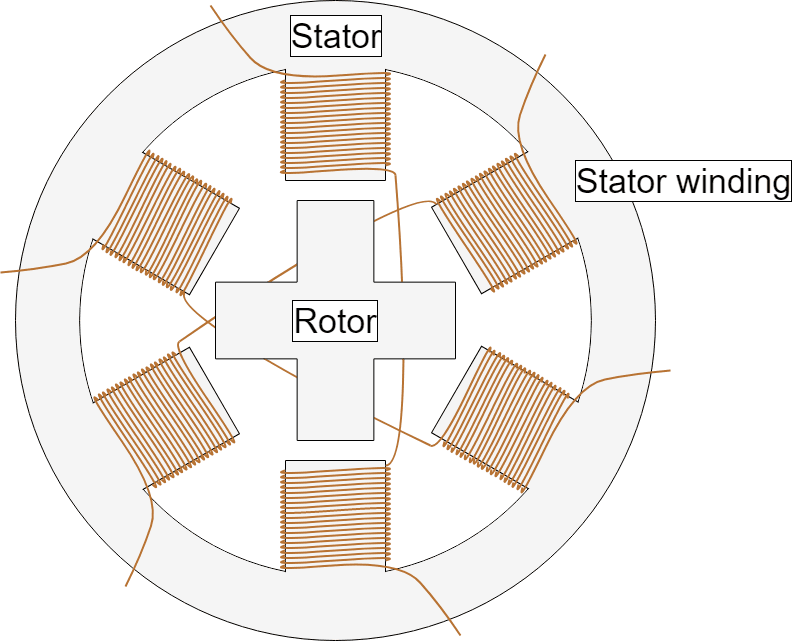
Stepper Motor Structure-monolithicpower
Stator is the stationary component of the stepper motor and is located on the outer part of the motor. It consists of coils that, when energized by electrical current, generate magnetic fields. These coils create the magnetic field that controls the rotor’s movement, causing it to rotate through interaction with the field.
Stator Components:
Role of the Stator:
Rotor is the rotating component of the stepper motor and moves in response to the magnetic fields generated by the stator. The rotor performs the motor’s power generation function and carries the driven load. The internal structure of the rotor varies depending on the motor type but generally includes magnets or magnetic materials.
Rotor Components:
Role of the Rotor:
Stepper motors are precise and reliable motors suitable for a wide range of applications. They are ideal for any application requiring high accuracy and controlled motion. Below are the common application areas and their advantages and disadvantages:

Stepper Motor in Industrial Robotic Arm Application-ato.com
ElProCus. "Stepper Motor: Construction, Working, Types and Its Applications." Accessed May 9, 2025. https://www.elprocus.com/stepper-motor-types-advantages-applications/.
Faradyi Motors. "Comprehensive Analysis of the Advantages and Disadvantages of Stepper Motors." Accessed May 9, 2025. https://faradyi.com/comprehensive-analysis-of-the-advantages-and-disadvantages-of-stepper-motors/.
Lammotor. "What Is Stepper Motor: Types, Applications, and Working Principle." Accessed May 9, 2025. https://lammotor.com/what-is-stepper-motor/.
Robotiksistem. "Step Motor Çeşitleri." Accessed May 9, 2025. https://www.robotiksistem.com/step_motor_cesitleri.html.
Operating Principle
Electrical Signals and Step Motion
Rotor and Stator Interaction
Step Angles and Precision
Step Motion and Position Control
Types of Stepper Motors
Bipolar Stepper Motors
Unipolar Stepper Motors
Hybrid Stepper Motors
Stepper Motor Construction
Stator (Stationary Part)
Rotor (Rotating Part)
Applications and Advantages/Disadvantages of Stepper Motors
Applications
Advantages
Disadvantages