+1 Daha
Uzamsal filtreleme, görüntü işleme ve sinyal işleme alanlarında sıkça kullanılan bir yöntemdir. Bu teknik, bir görüntünün piksellerini doğrudan manipüle ederek belirli özelliklerini değiştirmeyi amaçlar. Gürültü azaltma, kenar algılama, keskinleştirme veya bulanıklaştırma gibi işlemler, uzamsal filtreleme ile gerçekleştirilebilir.
Uzamsal filtreleme, dijital görüntü işleme ve sinyal işleme alanlarında, bir görüntünün piksel değerlerini doğrudan manipüle ederek belirli özelliklerini değiştirmek veya iyileştirmek için kullanılan bir tekniktir. Bu yöntem, görüntünün uzamsal alanındaki (spatial domain) verilerle çalışır; yani, piksel koordinatları ve yoğunluk değerleri üzerinde işlemler gerçekleştirir. Uzamsal filtreleme, frekans alanındaki filtreleme tekniklerinden (örneğin, Fourier dönüşümüyle yapılan işlemler) farklıdır, çünkü herhangi bir dönüşüm yapmadan, görüntünün ham piksel verilerini kullanır.
Uzamsal filtrelemenin temelinde, bir "çekirdek" (kernel) veya "maske" adı verilen küçük bir matrisin görüntünün her pikseline uygulanması yatar. Bu çekirdek, bir pikselin değerini, komşu piksellerin değerleriyle birlikte ağırlıklı bir şekilde birleştirerek yeni bir çıktı değeri üretir. İşlem, görüntünün tamamına kaydırma (sliding window) yöntemiyle uygulanır. Bu süreç, matematiksel olarak "konvolüsyon" (convolution) olarak adlandırılır ve uzamsal filtrelemenin temel yapı taşını oluşturur.
Bir görüntü f(x,y) olarak temsil edildiğinde ve çekirdek h(m,n) olarak tanımlandığında, uzamsal filtreleme sonucu oluşan çıktı görüntüsü g(x,y) şu formülle hesaplanır:
Bu formül, çekirdeğin merkezinin her piksel üzerine yerleştirildiğini ve komşu piksellerin ağırlıklı toplamının hesaplandığını ifade eder.
1- Çekirdek Seçimi: Örneğin 3x3 ortalama bir filtre kullanılır.
Bu çekirdek, her piksele eşit ağırlık verir (1/9).
2- Görüntü Üzerinde Kaydırma: Çekirdek, görüntünün sol üst köşesinden başlayarak her piksel üzerine yerleştirilir. Kenar pikseller için genellikle sıfır dolgusu (zero padding) veya yansıtma gibi yöntemler kullanılır.
3- Hesaplama: Görüntünün bir bölgesindeki piksel değerlerinin şu şekilde olduğu varsayılırsa,
Çekirdek bu bölgeye şu şekilde uygulanır:
Merkez pikselin yeni değeri 50 olur.
4- Sonuç: Bu işlem, görüntünün her pikseli için tekrarlanarak filtrelenmiş bir çıktı görüntüsü elde edilir.

Orijinal görüntü ile filtrelenmiş görüntü arasındaki piksel işlemi (Kredi: Gonca İnönü)
Uzamsal filtreleme, farklı amaçlar için kullanılabilir:
Uzamsal filtreleme türleri, temel olarak düşük geçişli filtreler (low-pass filters) ve yüksek geçişli filtreler (high-pass filters) olmak üzere iki ana kategoriye ayrılır. Uygulama yöntemine göre ise doğrusal filtreler ve doğrusal olmayan filtreler olmak üzere ikiye ayrılır.
Düşük geçişli filtreler, görüntüdeki düşük frekanslı bileşenleri korurken yüksek frekanslı bileşenleri (ani değişiklikler, keskin kenarlar gibi) bastırır. Bu filtreler, genellikle görüntüyü yumuşatmak (blurring) ve gürültüyü azaltmak için kullanılır.
Ortalama (Mean) Filtresi, her pikselin etrafında bir kernel oluşturur, bu kernel içerisindeki bölgedeki piksel değerlerinin ortalaması alınır ve filtrelenmiş görüntüdeki pikselin yeni değeri olarak atanır.

Hazırlayan ve düzenleyen: Beyza Nur Türkü
Gauss Filtresi, görüntünün piksel değerlerini komşu piksellerle Gaussian dağılımına dayalı ağırlıklarla birleştirerek görüntüyü bulanıklaştırır. Piksellerin ağırlıkları mesafelerine göre değişir: merkeze yakın pikseller daha fazla ağırlık alır, uzak pikseller daha az ağırlık alır.

Hazırlayan ve düzenleyen: Beyza Nur Türkü
Medyan Filtresi, piksel değerlerini bir çekirdek içerisindeki piksel değerlerinin sıralı ortanca (medyan) değerleriyle değiştirir.

Hazırlayan ve düzenleyen: Beyza Nur Türkü
Minimize Operatörü veya Minimum Filtresi, görüntüdeki her pikselin çevresindeki belirli bir bölge içerisindeki en küçük değeri alarak o pikselin yeni değeri olarak atar.

Hazırlayan ve düzenleyen: Beyza Nur Türkü
Maksimum Operatörü veya Maksimum Filtresi, görüntüdeki her pikselin çevresindeki belirli bir bölge içerisindeki en büyük değeri alarak o pikselin yeni değeri olarak atar.

Hazırlayan ve düzenleyen: Beyza Nur Türkü
Disk Filtresinde kernel dairesel şekle sahiptir, bundan dolayı “disk” adını almıştır.

Hazırlayan ve düzenleyen: Beyza Nur Türkü
k-NN Filtresi (k-Nearest Neighbors Filter), pikselin çevresindeki komşularından en benzer k tane pikselin değerlerini dikkate alarak yeni bir değer hesaplar. “En benzer” kavramı genellikle yoğunluk benzerliği ile ilgilidir ve piksellerin ortalaması alınarak merkez pikselin değeri güncellenir.

Hazırlayan ve düzenleyen: Beyza Nur Türkü
Yüksek geçişli filtreler, görüntüdeki yüksek frekanslı bileşenleri (kenarlar, detaylar gibi) vurgularken düşük frekanslı bileşenleri (düz alanlar) bastırır. Bu filtreler, genellikle görüntü keskinleştirme veya kenar tespiti için kullanılır.
Sobel Filtresi, görüntüdeki yoğunluk değişimlerini hesaplayarak kenarları vurgular. Genellikle yatay ve dikey yöndeki gradyanları ayrı ayrı hesaplamak için iki farklı çekirdek kullanılır ve gradyanların birleşimiyle kenarların tam konumu ve gücü belirlenir.

Hazırlayan ve düzenleyen: Beyza Nur Türkü
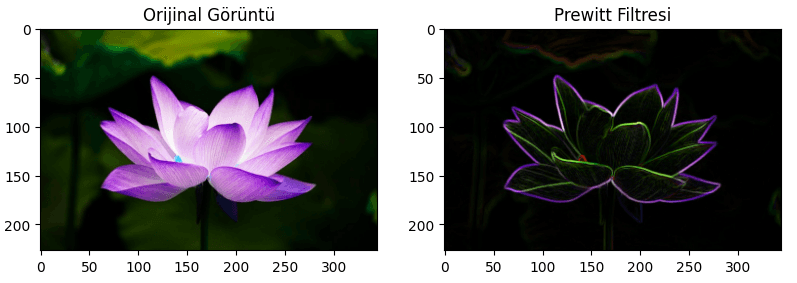
Prewitt Filtresi, Sobel Filtresine benzer şekilde, görüntünün yoğunluk değişimlerini hesaplayarak kenar vurgular.
Hazırlayan ve düzenleyen: Beyza Nur Türkü
Laplacian Filtresi, görüntünün ikinci türevini hesaplayarak yoğunluk değişimlerinin hızını (kenarları) vurgular. Laplacian Filtresi yön bilgisi vermez sadece yoğunluk değişimlerinin büyüklüğünü tespit eder.

Hazırlayan ve düzenleyen: Beyza Nur Türkü
LoG (Laplacian of Gaussian) Filtresi, Gauss Filtresi ile Laplacian Filtresinin bir kombinasyonudur. Önce görüntü Gauss bulanıklaştırma ile yumuşatılır ardından Laplacian operatörü ile ikinci türev hesaplanarak kenar vurgulanır.

Hazırlayan ve düzenleyen: Beyza Nur Türkü
Al-Mustansiriya University. “Spatial Filtering Lecture Notes.” Erişim 23 Mart 2025. https://uomustansiriyah.edu.iq/media/lectures/9/9_2020_03_29!01_33_39_AM.pdf.
Edmund Optics. “Understanding Spatial Filters.” Erişim 23 Mart 2025. https://www.edmundoptics.com/knowledge-center/application-notes/lasers/understanding-spatial-filters/.
Fiveable. “Spatial Filtering - Computer Vision and Image Processing.” Erişim 23 Mart 2025. https://library.fiveable.me/computer-vision-and-image-processing/unit-2/spatial-filtering/study-guide/8C0r08Ol3JeOinbk.
GeeksforGeeks. “Spatial Filtering and Its Types.” Erişim 23 Mart 2025. https://www.geeksforgeeks.org/spatial-filtering-and-its-types/.
Mandeel, A. “Lecture 6: Spatial Filtering in Digital Image Processing.” Erişim 23 Mart 2025. https://mandeel.github.io/Files/DIP/lecture%206.pdf.
MathWorks. “What Is Image Filtering in the Spatial Domain?” Erişim 23 Mart 2025. https://www.mathworks.com/help/images/what-is-image-filtering-in-the-spatial-domain.html.
NI. “Spatial Filtering.” NI Vision Concepts Help. Erişim 23 Mart 2025. https://www.ni.com/docs/en-US/bundle/ni-vision-concepts-help/page/spatial_filtering.html.
University of Anbar. “Spatial Filtering in Image Processing.” Erişim 23 Mart 2025. https://www.uoanbar.edu.iq/eStoreImages/Bank/9782.pdf.
Henüz Tartışma Girilmemiştir
"Uzamsal Filtreleme" maddesi için tartışma başlatın
Uzamsal Filtreleme
Temel Prensip
İşleyiş Adımları
Uzamsal Filtrelemenin Amacı
Uzamsal Filtreleme Türleri
Düşük Geçişli Filtreler (Low-Pass Filters)
Ortalama (Mean) Filtresi
Gauss (Gaussian) Filtresi
Medyan (Median) Filtresi
Minimum Filtresi
Maksimum Filtresi
Disk Filtresi
k-NN Filtresi
Yüksek Geçişli Filtreler (High-Pass Filters)
Sobel Filtresi
Prewitt Filtresi
Laplacian Filtresi
LoG (Laplacian of Gaussian) Filtresi