Bu madde henüz onaylanmamıştır.
Matematiksel modelleme, gerçek bir fiziksel sistemin davranışlarını matematiksel ifadeler, denklemler ve mantıksal ilişkiler yoluyla temsil etme sürecidir. Bu süreçte, incelenen sistemin temel dinamikleri; kütle, kuvvet, momentum, enerji, hız ve konum gibi fiziksel büyüklükler kullanılarak tanımlanır. Model, sistemin belirli koşullar altında nasıl davranacağını öngörmek ve bu davranış üzerinde denetim sağlayabilmek amacıyla oluşturulur.
Doğrusal sistem, giriş ve çıkış arasında orantılılık ve toplanabilirlik (superposition) özelliklerinin geçerli olduğu sistemdir. Yani bir giriş iki katına çıkarılırsa çıkış da iki katına çıkar; birden fazla giriş uygulandığında sistemin tepkisi bu girişlerin tepkilerinin toplamıdır. Bu tür sistemler matematiksel olarak daha basit, analizi kolay ve kontrol tasarımına uygun yapıdadır.
Doğrusal olmayan sistem ise giriş–çıkış ilişkisi orantılı olmayan, superposition ilkesinin geçerli olmadığı, dinamikleri koşullara göre değişen sistemdir. Gerçek fiziksel sistemlerin büyük çoğunluğu doğrusal olmayan davranış gösterir. Roketlerde kütle değişimi, Euler açıları, itki doğrusal olmayan vana karakteristikleri ve dönme hareketleri bu tür dinamiklere örnektir.
Dikey inişli roketler, fırlatma sonrasında görevini tamamlayan ve yeniden kullanılmak üzere dikey olarak zemine iniş yapabilen roket türleridir. Bu roketler, iniş sırasında aerodinamik yüzeyler ve itki tabanlı kontrol yöntemleri kullanır. Roketin motoru veya ayarlanabilir itki sistemi, hızın azaltılması ve yönelimin stabilize edilmesi için ters itki (retro-propulsion) üretir. Böylece roket, kara veya deniz platformuna kontrollü bir şekilde dikey olarak iniş yapabilir.
Dikey iniş teknolojisinin temel amacı, roket bileşenlerinin yeniden kullanılabilirliğini artırarak fırlatma maliyetlerini düşürmektir. Bu yaklaşım hem özel hem devlet uzay programlarında giderek yaygınlaşmaktadır. Dikey inişli sistemler; hassas kontrol, gerçek zamanlı sensör füzyonu, gelişmiş yazılım mimarileri ve doğru dinamik modelleme gerektirir. Günümüzde birçok özel kuruluş, devlet uzay programı ve araştırma grubu tarafından kullanılan bu teknoloji modern uzay mühendisliğinin önemli bir çalışma alanı hâline gelmiştir.
Dikey inişli roketlerde matematiksel modelleme, roketin uçuş sırasında maruz kaldığı kuvvetlerin, momentlerin, kütle değişiminin ve yönelim dinamiklerinin zamanla nasıl evrildiğini açıklayan bir çerçeve sağlar. Bu modeller doğrusal veya doğrusal olmayan biçimde kurulabilir. Bu çalışmada ise roketin fiziksel davranışını daha gerçekçi şekilde temsil edebilmek amacıyla tamamen doğrusal olmayan, Newton–Euler tabanlı bir modelleme yaklaşımı ele alınacaktır.
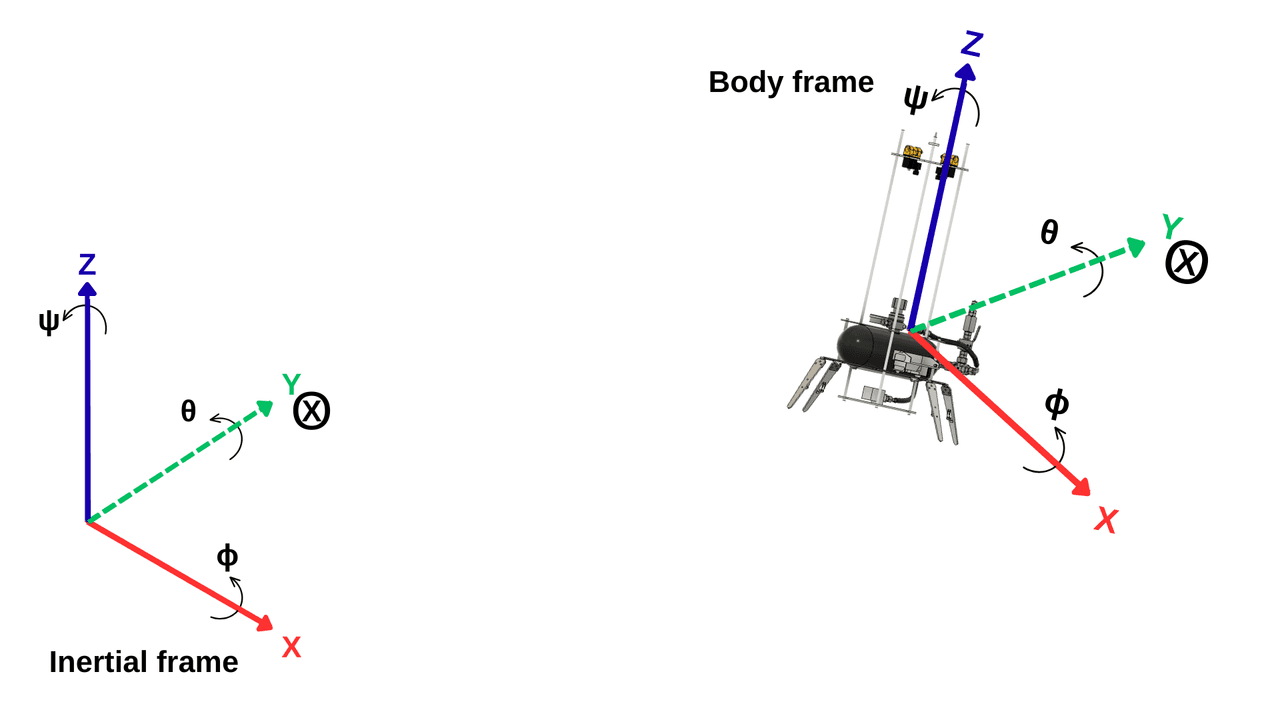
Dikey inişli roketlerin doğrusal ve açısal hareketlerinin modellenebilmesi için iki temel referans çerçevesi kullanılır: atalet (inertial) çerçevesi ve gövde (body) çerçevesi.
Şekil 1’de gösterildiği üzere:
Roketin yönelimi, gövde çerçevesinin atalet çerçevesine göre konumunu belirleyen Euler açıları (φ, θ, ψ) ile ifade edilir.
Roketin gövde eksenlerindeki bir vektörün atalet çerçevesine dönüştürülmesi için aşağıdaki dönüşüm matrisi kullanılır:
Bu matris, Z–Y–X sıralı dönüşlerden oluşur:
Bu matris, gövde eksenlerinde tanımlanan herhangi bir fiziksel büyüklüğün (örneğin itki, açısal hız veya kuvvet vektörü) atalet çerçevesine dönüştürülmesini sağlar:
Aynı şekilde atalet çerçevesindeki bir vektörün gövde çerçevesine aktarılması için dönüşümün tersi kullanılır:
Bu dönüşümler, doğrusal olmayan 6-DOF Newton–Euler modelinin temelini oluşturmaktadır çünkü hem doğrusal hareket denklemleri hem de rotasyon dinamikleri bu çerçeve ilişkilerine dayanır.
Roketin kütle merkezi üzerindeki doğrusal hareket, Newton’un ikinci yasası ile ifade edilir:
Burada
Net kuvvet iki ana bileşenden oluşur:
Göve çerçevesinde (Body frame) tanımlı itki kuvveti, ataletsel çerçeveye (Inertial frame) dönüşüm matrisi (Rotasyon matrisi) ile aktarılır:
Dolayısıyla doğrusal hareket denklemi:
Roketin konum denklemleri ise:
Roketin gövde ekseni etrafındaki dönme hareketi Euler moment denklemi ile ifade edilir:
Burada
Denklem bileşenleri açık şekilde yazılırsa:
Roketin yönelimi Euler açıları ile ifade edilir.
Ancak açısal hızlar , gövde (body) eksenlerine göre tanımlanmış büyüklüklerdir. Bu nedenle Euler açıları türevleri doğrudan açısal hızlarına eşit değildir. Bu iki büyüklüğü ilişkilendiren dönüşüm matrisine kinematik dönüşüm matrisi veya T matrisi denir.
Açısal hızlar ile Euler açıları arasındaki ilişki:
bu eşitlik ile ifade edilir.
Dikey inişli bir roketin doğrusal ve açısal hareketlerini birlikte ifade eden Newton–Euler denklemleri doğrusal olmayan (nonlinear) bir yapıdadır. Bu nedenle sistemin hem simülasyon ortamında çözülebilmesi hem de kontrol algoritmalarında kullanılabilmesi için tüm durum değişkenlerinin bir vektör altında toplanması gerekir. Bu formülasyona durum uzayı gösterimi (state-space representation) denir.
Durum uzayı modeli, sistemin zamanla nasıl evrildiğini tek bir denklem seti altında toplar:
Burada
Bir dikey inişli roketin 6 serbestlik derecesi (6-DOF) vardır:
3 doğrusal hareket: ve bunların hızları
3 açısal hareket: ve bunların hızları
Bu nedenle durum vektörü şu şekilde yazılır:
Durum vektöründeki bileşenler:
Bu birleşik yapı sayesinde tüm hareket tek bir yapı üzerinden incelenebilir.
Kontol girişleri:
Burada
Newton–Euler dinamikleri kullanılarak sistem şu hâle getirilir:
Bu ifade, roket dinamiklerinin klasik kontrol formudur.
matrisindeki terimleri, denklem (1.2)'de verilen Euler açıları kinematik dönüşüm matrisinin elemanlarıdır ve gövde ekseni açısal hızlarının, Euler açı türevlerine dönüşümünü ifade eder.
matrisindeki terimleri ise denklem (1.1)'de tanımlanan Z–Y–X ardışık dönüşlerinden elde edilen rotasyon matrisinin elemanlarıdır ve gövde ekseninde tanımlanan kuvvetlerin ataletsel çerçeveye dönüştürülmesini sağlar.
Bu noktadan sonra tasarlanacak kontrolcünün yapısına bağlı olarak doğrusal olmayan sistem farklı şekillerde ele alınabilir. Eğer klasik doğrusal kontrol yöntemleri (örneğin LQR, PID veya H∞ denetleyiciler) kullanılacaksa, sistem bir veya birden fazla denge noktası etrafında lineerleştirilerek kontrolcü tasarlanabilir. Uçuş boyunca değişen çalışma koşulları için kazanç zamanla güncellenebilir ve bu yaklaşım gain scheduling olarak adlandırılır.
Buna karşılık, sistemin doğrusal olmayan yapısını doğrudan kullanan kontrol yöntemleri tercih ediliyorsa (örneğin Nonlinear Dynamic Inversion – NDI veya Incremental NDI – INDI), lineerleştirme adımına gerek yoktur. Bu tür kontrolcüler, burada sunulan tam doğrusal olmayan Newton–Euler modelini doğrudan kullanarak tasarlanabilir ve özellikle dikey iniş gibi yüksek manevra gerektiren görevlerde daha yüksek takip performansı sağlayabilir.
Öte yandan, mevcut sistemde giriş matrisi tam kare bir matris olmadığı için doğrudan terslenebilir bir yapıya sahip değildir. Tasarlanacak kontrolcünün gereksinimlerine bağlı olarak, girişlerin etkilemediği durum değişkenleri sistemden çıkarılarak daha küçük boyutlu ve invertible bir matrisi elde edilebilir. Bu yaklaşım özellikle NDI veya INDI tabanlı kontrolcülerin tasarımında önemlidir, çünkü bu yöntemler giriş matrisinin tersine veya psödo-tersine ihtiyaç duyar.
Aliyu, B. K.Expendable Launch Vehicle Flight Control – Design & Simulation with Matlab/Simulink. Master’s Thesis, Saint-Petersburg State University of Aerospace Instrumentation, Ministry of Education and Science of the Russian Federation, 2010.
Bowles, D. S.Flight Simulation and Thrust Vector Control of a Small Scale Solid/Hybrid Rocket via Nonlinear Direct Adaptive Control. M.Sc. Thesis, California Polytechnic State University, August 2006.
Fatih Erol Mühendislik. “Part 3: Auto Landing – Vertical Lander Rocket: SpaceX Falcon 9.” YouTube video, September 14, 2025. https://www.youtube.com/watch?v=RS2-aFrRCkw
Kisabo, A. B., Adebimpe, A. F., Okwo, O. C., and Samuel, S. O. “State-Space Modelling of a Rocket for Optimal Control System Design.” Journal of Aircraft and Spacecraft Technology 3, no. 1 (2019): 128–137. https://doi.org/10.3844/jastsp.2019.128.137
Tekin, R.Design, Modeling, Guidance and Control of a Vertical Launch Surface-to-Air Missile. M.Sc. Thesis, Middle East Technical University, September 2010.
Henüz Tartışma Girilmemiştir
"Dikey İnişli Roketlerde Matematiksel Modelleme" maddesi için tartışma başlatın
Matematiksel Modelleme Nedir?
Doğrusal Sistem ve Doğrusal Olmayan Sistem Nedir?
Dikey İnişli Roketler
Bu Çalışmanın Yaklaşımı
Koordinat Sistemleri ve Dönüşümler
1. Koordinat Sistemlerinin Tanımı
2. Rotasyon Matrisi
6-DOF Newton–Euler Hareket Denklemleri
Translasyon Dinamikleri (3 DOF)
Rotasyon Dinamikleri (3 DOF)
Euler Açılarının Kinematik Denklemleri
6-DOF Durum Uzayı Gösterimi
Durum Vektörünün Tanımlanması
Giriş Vektörünün Tanımlanması
Genel Doğrusal Olmayan Durum Denklemi